����Ȼ���У��ܶ�������������~��ˮĸ�����x�ȶ���߭h����֪�����Ͷ�ģ�B�\���������������@Щ���ص����������������܉��ڸ�֪���h��׃����ͬ�r���m�r���{���������Π��������̎�Ŀ��gλ�ã��M���ڏ��s�h������ɸ��N���m���\�ӣ�������������������e�ʺ͑���푑������P��Ҫ���c�@Щ����������ȣ��F�е��������������Դ�����׃ģʽ��һ���\���^�̾�����ȱ�����ҷ��������Ȇ��}���@Щȱ�c�������������������ڏ��s��׃�h���е��`���Ժ��m���ԣ�ʹ���y�ԑ����ڌ��H�����С���ˣ��_�l���ж�ģ�B�\�������ͷ����Ը�֪��������������������һ���O�����x���о��n�}��
���գ��|����W��WԺ���F�������ڡ��Ϸ��������c�Ĵ��p������W���Ž��ں������Ƃ���һ�N��߳���푑��ٶȡ���ģ�B�\���������`���Ը�֪���Եĺ��d��ˮ���z������ԓ�����Ԝض��T������x�ۺϷ����Ƃ�ĺ��d���N-��������ϩ������PNIPAM��ˮ���z����A���Y�ϴ���Fe3O4�{�����ӵ�ԭλ���W�������;�������PPy����ԭλ�����ۺϣ������˾��ж�푑��Եĺ��d���Ը�֪ˮ���z��S-PNIPAM/Fe3O4/PPy����ͨ�^�{�����t���ʹň��IJ�ͬ�M�ϣ�����S-PNIPAM/Fe3O4/PPy��ˮ���z�����܉������S���g�ȷքe����ۯB���տs����/��ۙ�����⏝�����h�̹�/���{�صĿɶ��ƶ�ģ�B��׃�����⣬�ڴň������£�ˮ���z����߀�܉������]���g�о��_������ָ��λ�ã�������ץȡ�����\��ጷŵ�һϵ���B�m��׃�О�����Ɍ��H�Ĺ����΄ա�ֵ��ע����ǣ�PPy������ʹˮ���z�����ڰl����׃�r�܉�a���əz�y�Č��r늌W��̖���������@�N���t�����Ը�֪���ԣ�ͨ�^��늌W��̖ӳ���D����̖��ˮ���z��������׃�^���܉�õ��ˌ��r�ĈD�������������@�N��Ч��늌W�����C�ƣ�ˮ���z�����܉���Чģ�����������w�ڏ��s�h���е����m���\�ӡ��������г��F�ɔ_���ؕr���ɔ_���ɔ_���ˮ���z�����܉�Ѹ�ٵظ�֪���Д�h��׃����r����������̖��������������׃�О������m���{����չ�F�����õ����\������m���������@�N���ж�ģ�B�\�������ĺ��d���Ը�֪ˮ���z��������и��ߵ������Ժ͏��s�Ե���һ�����ԙC���˵��_�l�ṩ����˼·��
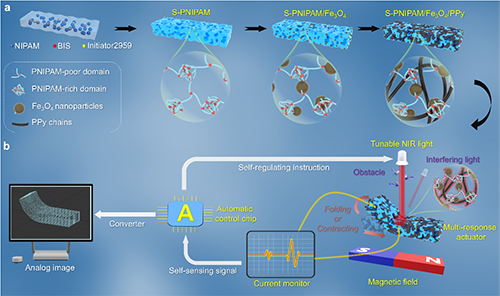
�Dһ����푑����d���Ը�֪ˮ���z���Ƃ������Լ��]�h��·������ˮ���z�����Ŀ�ҕ����ģ�B�\��ʾ��D��
���c1���ɶ��ƵĶ�ģ�B�\���О�
�������У�����Fe3O4�{�����Ӻ͌�늾ۺ���PPy�x�躣�d��PNIPAMˮ���z�����õĴ�푑��Ժ���D�����ԣ�ͨ�^�{�����t���ʹň��IJ�ͬ�M�ϣ�ˮ���z�����܉�քe��ɡ��ۯB-�֏͡��\���О�͡��տs-��չ���\���О�ȃɷN��ͬģʽ�Ŀɿ���׃��ͨ�^��׃��ʹŵĽM����r��ˮ���z�������\���О��܉��ڃɷNģʽ�g�����ГQ�����⣬ͨ�^�{�����t���/�ň��Ĕ��������gλ�ú����÷�������̼�������ˮ���z�����܉�քe��ɹ�/��ۙ���خ��ԏ����Ȳ�ͬ��͵�������׃��չ�F���ɶ��ƵĶ�ģ�B�\��������

�D����ˮ���z���������ۯB-�֏͡���׃�О�͡��տs-��չ����׃�О�

�D����ˮ���z�����Ĺ�/��ۙ��׃�О���خ��ԏ�����׃�О�
���c2�����ʵĴſ،�������
�������У����Բ��ϵ������x��ˮ���z�������õĴ�푑��ԣ����ⲿ�ň������£�ˮ���z�����܉����Ɍ��������]���g�ȵ�����ָ��λ�ã���������Ԍm���ȿ��g�Ƅ��΄գ��ڽ��t���������£�����߀�����l����տs��׃���M�����ͨ�^���]���g�ȵ�����ضΣ���ijЩ�Mխ�^��ȣ������⣬������ˮ���z�������õĴſ،�������������׃����������ˮ���z�����Ƃ������ץ���܉������]���g�����ץȡ���Ƅӣ�ጷŵ�һϵ���B�m�\���О飬���������ͬ�Č��H�΄ա�

�D�ġ����]���g��ˮ���z�����Ĵſ،����О���B�m��׃�О�
���c3�����t������׃�Ը�֪����
�������У�ˮ���z�ȵĺ��d��PNIPAM�W�j�c��늾ۺ���PPy�γ��˰뻥���W�j�Y�����ɷN�M���܉��ڽӽ����Ӽ��e���^�߶�����Ч�ͺϡ���ˮ���z�����l����׃�r��PNIPAM�W�j���տs������PPy����朰l��ͬ���w�ƣ��a��늌W����׃����������PNIPAM�W�j�cPPy�����֮�g���صİ뻥���W�j�Y����ˮ���z��������׃�О��c��늌W������̖��ͬ�r�a�����ڲ�ͬ�̼������µ��B�m�yԇ��50��ѭ�h�yԇ�У�����׃������늌W�Ը�֪���������F�����õķ����ԡ��Y�ϡ�늌W��̖-�D����̖�����D�Q�˿ڣ������ď����О��܉�õ����r�ĈD��ģ�M��

�D�塢ˮ���z�������Ը�֪���ܼ���׃�^���еČ��r�D��ģ�M��
���c4�����s�h���е���׃���m������
�ڵ��t���Ը�֪���ܵĻ��A�ϣ�ͨ�^�B�ӵ��O�y�����Ԅӿ���ϵ�y�����{�C�������ȽM�����ɵ��]�h���ƻ�·�У�ˮ���z����չ�F���ˏ��s�h���е���׃���m����������ԓ��·�У�ˮ���z������߸�������Ч�������p�����������������W��̖�����յ��t�����̖����ģ�M�������͂����������h���г��F�ɔ_���ɔ_��r��ˮ���z�������О��ˑB�l����׃���a�����r��늌W��̖�������䷴������늌W��̖���]�hϵ�y�܉��ڟo�˸��A����r��ˮ���z������̎�ĭh����r�M�п����Д࣬��ͨ�^��׃��������������⏊�����F���������О���ˑB�Ŀ����{�����@�N���m���\���О���һ���̶���ģ�M����Ȼ����������������-���⡱ϵ�y���Ƶ������\�ӣ����������ܷ������ϵ��OӋ���_�l�ṩ���µ�˼·��

�D����ˮ���z�����ڏ��s��׃�����е����m����׃�О顣
�YՓ��ԓ�����Ƃ���һ�N���ж�푑��Եĺ��d���Ը�֪ˮ���z��������ԓ���Ϙ�����ˮ���z���������F���ɶ��ƵĶ�ģ�B�\�����������ʵĴſ،����������`����늌W�Ը�֪�����͏��s�h���е���׃���m�����������F�ˏ��s�����е����\������m��������һ������ܛ�w�C���˵��OӋ�������ṩ���µ�˼·��
ԓ�ɹ�����Sponge-like PNIPAM/Fe3O4/PPy composite hydrogel actuator with rapid response, self-sensing and multiple manipulating manners for complex application scenarios�� ���}�l���ڡ�Chemical Engineering Journal�������|����W��ʿ�о������d�������µĵ�һ���ߣ��|����W���F�������ڡ��Ϸ��������c�Ĵ��p������W�������������µĹ�ͬͨӍ���ߡ�
ԭ��朽���
https://authors.elsevier.com/c/1lkUO4x7R2oFT1
https://doi.org/10.1016/j.cej.2025.168066
- ꃿƴ����A�����۶�� AFM�����������μܘ����m��ֲ���N��Janus���Ƥ�w����ֲ���ģ�B���ͱO�y 2026-03-29
- UCLA �����A���ڈF� AFM��ͨ�^��ƽ���^�̌��F�Π�ӛ���ۺ���ɾ��̶�ģ�B�Π��ݻ� 2025-12-23
- �A�пƼ���W�Ǻ����� AFM����ģ�B��Ƥ�������ӵįd���ȼ����^�u�� 2025-11-23
- �����������Ժʿ�F� CEJ���������ܟ���oϵ�y�ľ��п��{�������ܵ��Ը�֪�Π�ӛ�����ȩ�����z 2025-01-18
- ��������Ͻ��ڈF� AFM����֬/�����x��ˮ���z���ڜض��Ը�֪���푑��� 2024-01-10
- �|����W��Ұ�F� NML����������Ը�֪�ӵ��ݶ�ˮ���z����ܛӲ�C���˵��h�̽��� 2024-01-10
- �Ͼ����I��Wë����/��҂����ڡ��Ͼ���W�Ę��tԺ�O���ƽ��� AFM��ؓ�d�ɼ�������ˮ���z���D���w�S�� 2026-04-03
