������z���˙C������HMI��������չ�F�����Ý�����������ԡ��܄���ه�Ե�ȱ���L���Ƽs���H���á����о�ͨ�^�OӋһ�N�o�܄�����ȡ���p�W�j���������zͻ���������ޡ�������p�Y�c�����T��ȡ��ąfͬЧ���@�������������W����133.86 MJ/m3����ȡ���Y������׃�оS���ͨ·�����ԣ��x����϶�ģ�B���`���Ȃ������ԣ�250%��׃���`��ϵ��GF=1.4���ض�푑�ϵ��TCR=14.7% oC-1���������ԣ�>300��ѭ�h�o��̖ͻ׃����ͨ�^��Һӡˢ��UV�̻��������ڹ�����HMI�������w�����ף��P���\���R�e���t��17 ms����������������푑����t��34 ms�����߷ֱ��ʜضȂ�������
���ڣ����T��W�������������Ϲ����о�Ժ�O���LjF������Ե�����������T��ȡ�����������ԣ�ͨ�^���ӌ���ąfͬ���ÙC�ƣ��ɹ��_�l�����T�������p�W�j���������z�������A�ܽ����������߷������۱�ϩ���������ϩ��/�Ȼ�đ�A����wϵ���γɷ������p�W�j�Y��������չ�F��30.7 MPa�����쏊�ȣ�703%�������L�ʣ���133.86 MJ/m3���g�ԣ��^���Ș�����6.2�����D1c-d�������s�yԇ�@ʾ98%��׃�����ܻ֏�96%ԭʼ�ߴ���߅��ȱ��ԇ�Ӕ��ё����_5.85 MPa���^���Ș�Ʒ����4.3����ͨ�^ƫ�����Ƭ�����Ѽy�������ֲ����D2e-f���@ʾ�@�����0%M1000��Ʒ���Ѽy����γɾֲ�ɳ©������Ѕ^����3%M1000��Ʒ�ʬFȫ��Uɢ�͑����ֲ����Y������Ԫ�������Ș���von Mises������ɳ©�ֲ�����˷�ֵ26 MPa������3%M1000��Ʒvon Mises�������F��Ӡ�Uɢ������˷�ֵ62 MPa���^����������2.4������ͨ�^ƫ�����Ƭ������Ԫ������ʾ�������C�ƣ����LPAM�������r�γ�ȡ�����У����Ѽy��˵ľֲ��������f�������W�j���D2h�����ӑB���I�W�jͨ�^������Ѻ�ɢ������ͬ�rPAM�p�Y�W�j��K�Ѽy�Uչ���@�N�����w�p�@���g+�L��ȡ��+�̳̄ӑB�������ąfͬ���ã�ͻ���˂��y���Ϗ����c��չ�ԵĴ������LҎ�ɡ�
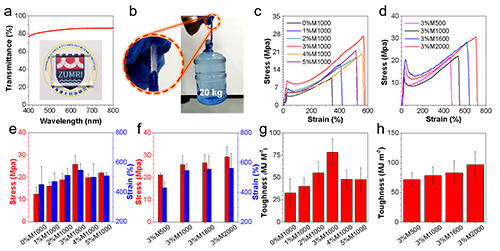
�D1. a���p�W�j������z���ʡ�b������20 kg������Ƭ��c����ͬPAM�������p�W�j������z����-��׃������d����ͬ������PAM���p�W�j������z����-��׃������e���� f����Ʒƽ�������c��׃ֵ��g���� h)��Ʒ�g��ֵ��

�D2. a��߅��ȱ��ԇ�����쌍�ʾ��D����ͬPAM����ȱ��ԇ�ӵ����쑪��������b������c����d���z�g��ֵ���ȡ�e��ƫ�����Ƭ��f��ƫ��⏊�ȷֲ��D��g������Ԫģ�M��h�����������µ��^�Y��ģ�͡�

�D3.�w������ ���r���Ƶķ����Cе�֡�a����̖�C����ʾ��D��b������D��c��ģ�M늉���̖�����D��

�D4. a���Ӿ��D���w�������_�{���Cе��ָ�P�������Ƕȣ��P�������Ƕȷքe�飺b��0����c��45����d��75����e��90����f��105����
���S����yԇ�@ʾ���������׃������R/R0���S��׃�ʾ������L��GF=1.4��R2=0.9955�������ϵ�Һ�B��UV�̻��ԣ�ʹ֮�ӹ���ʽ���������ף��Ƃ��ˣ���1���w�����ף����ڌ��r���w�\�Ӳ��c�����ֿ������乤��������D3a��ʾ����ָ�������l�������đ�׃-���׃�����a���B�mģ�M늉���̖����оƬ̎�����әCе���IJ��M늙C��푑��ٶ���17 ms���D4b�Cfչʾ���B�m���P���\��ۙ���ܣ�ģ�M늉�ݔ���c�P���Ƕȣ�45����75����90����105�����ʾ����P��܉�Eƫ��С�����ȬF�м��g��a��Ħ���{�װl늙C��TENG�����m�Ɍ��F�Թ�늂��У������}�_ʽݔ���������B�m�\�ӿ��ƣ�b����늂���������ه�P���ض��ݶȣ�����푑��t���c���g�ֱ��ʵ͵�ȱ�ݡ���2��4×4���������������D5����ͨ�^���n��ӡˢ��ˇ���Ƃ����ʽ���������c������ه�������в�ͬ��ԓ�OӋ��������{��ԭ������ͬ�r���F���|�c�ӽ������������c�|�ؙz�y��λ��ۙ��푑�����34 ms����3���������ضȂ��������D6�������{�ؙC��Դ��������fͬ���ã�a���ۺ���朶΄����W���ضȼ������\�����{���x��ͨ���ɼ�������b���ض���ه�ķǹ��r�I����/�ؽM�{���x��ͨ���ܶȣ�c���ἤ���x�ӂ�ݔ���x�����\�ӣ������͜^��-24�C9.4 oC�����F������ĜضȂ������ܣ�TCR = 14.7% ��C-1����

�D5. ���ʽ��������У�a�����������̖���a��SOS����Ħ��˹늴a���Fʾ��D��b��ӡˢ���Ƃ����Ԃ�������С�c������|������̖-�������̈D��d����݂�������Ќ���D�c�Y��ʾ��D��e������|���·ԭ��D��f���z�y�|��ݔ������ʽ�|��������й������ĈD��
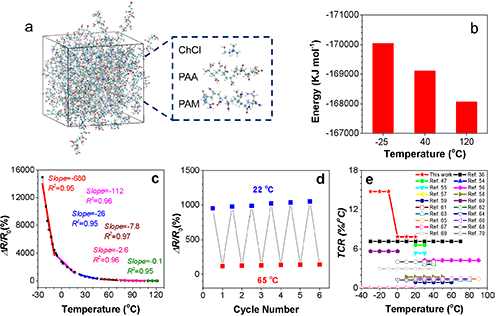
�D6. a�����ӄ����Wģ�M���͡�b����ͬ�ض��µķǹ��r�I�Y���ܡ�c����R/R0�ض�푑�������d����R/R0����ѭ�h׃��������e���������c�ш���ضȂ������Ĝض�푑�ϵ����TCR�����ȡ�
�YՓ
ԓ�о��_�l��һ�N�o�܄��p�W�j������z��ͨ�^�����w�p�@���g+�L��ȡ��+�̳̄ӑB�������ąfͬ���ã�ͻ���˂��y���Ϗ����c��չ�ԵĴ������LҎ�������ڴ��p�W�j������zƽ�_��������ģ�B�����������˙C���漰����ܛ�w�C���������ṩ�˲�ͬ��˼·��
ԭ��朽ӣ�https://doi.org/10.1002/adfm.202508233
- �|�A��W�����������n�}�M������ɺ��c����ȡ��fͬ�T���ۼ������PHBV�w�S�ľ��w�Y���D׃ 2017-07-17
- �A�����������塢�V�|������W�� AFM��ľ�|�ؘ����ӑBҺ���p�W�j - ��������ܹ�����˹����� 2026-03-27
- ���������G����/���|�ܸ����ڈF� AFM����������x�p�W�j�ۺ���F�Π�֏���ʼ�ضȵĿɾ����{�� 2026-01-12
- ���ϴ�W���ٺ�/�����F� Small��ԭλ�V�����ɵ��p�W�j�Y�������ǏͺϚ����z�������ʯ�ͻ����ز��� 2025-10-27
- �A�����������塢�V�|������W�� CEJ���o�܄�ԭλ������Բ��Ԍ��Fľ�|��/PBAT�ͺϲ������W������c���ϻ����܅fͬ���� 2026-03-31
- ���ݴ�Wه�S���n�}�M AFM��һ�����o�܄����p�̻����� - ����o��ȫ��Ϳ�ӣ��x��ˮ�¹�Wϵ�y���LЧ���o 2026-01-27
- ����ҷ��ڽ��ڈF� AFM���o�܄��錧�ğ����Ծ۰����ͺϲ���-���з���������ğ�ɹ�푑� 2025-12-05
