�ɿ���׃������ܛ�w�C���ˡ�ܛ���Ϻͷ�������ȶ�N�������������Pע������Ȼ���OӋ��׃�����ṩ���S�����`�������磬�������N�v��С������h�����׃����������Ť�����@�N׃��Դ���ⲿ�̼��µăȲ��Ǿ��������箐�|��Û/�տs�����@Щ��Ȼ��׃ϵ�y�Ć��l�����N�����|�Y���������p�ӽY�����ݶȽY�����D�����Y���ѱ���������׃���ϡ����@Щ�����У��D�����Y��������{���Ȳ������ֲ��ڌ��F���s���S�Y�������Ȟ���Ч����Ȯ��|�Ԟ���ƈD�������|�Y�����z�����M�ֲַ��ṩ��һ�N�C�ơ��@�N�ܿصĮ��|�����Ԍ��F�ɾ��̵ăȲ������ֲ����M�����ⲿ�̼����F�ɿص����S���͡�
Ŀǰ�S����о��������������ԗl�y���A�λ�������߅���Π���ƽ�����zƬ���F�����S�Π��D׃��Ȼ������ƽ�����zƬ���������������Pע�^�١�һ����f�����z���ⲿ�̼������v����ͬ������Û/�տs���������׃�ο��l�����κη����@�������������A�y���v�M��͌��������������l�����D�����Y������ͨ�^��׃�D���Π���{�������ֲ����M����ˣ�������Π��D׃���ɈD����Ȼ����ⲻƥ�������ġ��ڈD�����Y�������zƬ�У����F���A�y����������Ϳɾ��̵��Π��D׃��Ȼ���о����^�١�
�Ї��ƌWԺ�������g�о����������ܽ���ƌW����������о��T�����w���о��T�F��������[Ƭ�����|�Y�����l���������[Ƭ��������/�������ܽY���D����ƽ�����҈D����ͨ�^�����T�����S����ۺ���WET-DIP�����Ԙ�����һ�N���҈D����ˮ���z-������-�����z��HSEO��Ƭ�����F�ˏ��s���S�Y���Ŀɾ����Ƃ���ͨ�^�������쑪���̓Ȳ������Ĺ�ͬ���ã����Ԍ��F���ʿɿصĿv�S�͙M�S������ͨ�^�{�����҈D�������������z���|�ļs�����ã����Եõ���ͬ�����S���s�Y����
ԓ�о��ɹ�����Bioinspired Programmable Biaxial Rolling Gel Sheets for Complex 3D Morphing�����}���l����Advanced Materials����Adv. Mater. 2026, DOI: 10.1002/adma.202519226�����п�Ժ��������ʿ����ط���ͱ���������W���L�@��������ԓՓ�ĵĵ�һ���ߣ�ͨӍ���ߞ��п�Ժ���������w���о��T��������о��T��
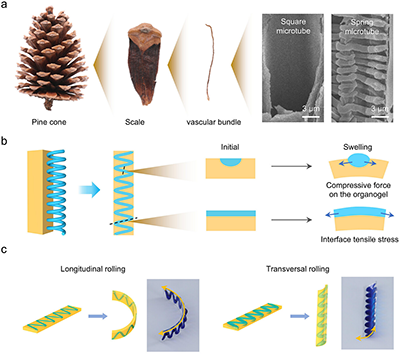
�D1. ���������l�����҈D����HSEOƬ�ķ����OӋ����

�D2. ���҈D����HSEOƬ���Ƃ��c����
���҈D�����Y�����Hͨ�^��/ˮ���z�������쑪���{����׃����߀ͨ�^������ˮ���z�������z���|�ĉ������{�Ȳ������ֲ������F�˿v�S�����c�M�S���������Ŀɾ����{�����о��F�ϵ�y̽�������҈D���������粨�L��������w��ˮ���z����������z���|�ļs���������zƬ��׃�О��Ӱ���ͨ�^���_�{�����L��������ˮ���z��Ⱥ������z���s�������Ԍ��F�ɾ��̵��p�S���ʿ��ƣ��Ķ����F���s�����S׃�νY���������������ʿ��Ƶ�ָ������ͨ�^�{�������D���������Ɍ��FHSEOƬ�Ķ��Sƽ��Ƭ�ĵ����S���s�Y�����紬�Ρ����Ρ������εȣ��Ŀɿ��D׃��

�D3. ��ͬ���҅��������҈D����HSEOƬ�Π��D׃��Ӱ�

�D4. �����҈D���{�ص����҈D����HSEOƬ�Ŀɾ����Π��D׃

�D5. �����҈D���{�ص����҈D����HSEOƬ�Ŀɾ��̏��s3D�Π�׃��
���⣬�������Y��չ�F���c���y���Y���෴����׃�О顣ͨ�^����Ԫ�����l�y�D�����zƬ����׃�Ξ飬����ʾ��Ȳ������ֲ��c��׃�C�����ڰ����Y���У���ֱ�ڗl�y�Ľ��摪�������ؗl�y�����쑪������ֱ�ڗl�y�Ľ������쑪����Ҫ��ˮ���z�Ȳ���Û����ăȲ������ӣ��Ķ����܇������z�a�����s����ˮ���z�l���܇������z�ĉ��s���Ǐ�������Ҫ�����������z�еĽ������쑪����Ҫ�{����������

�D6. �����ʽ�Y���c���Y�����|���zƬ֮�g����׃���^
ԓ�о����H�����һ�N���͵Ŀɾ������S��׃�C�ƣ�Ҳ��ܛ���ϏĶ��S�D����Ƭ�����S�Y���Ŀɿ��D׃�ṩ���µķ������ԡ����_�l�����z������ܛ�w���������m�������������t�W���̵��I����ЏV韵đ���ǰ����
ԓ�����õ��ˇ�����Ȼ�ƌW����22575259��22521103�����Ї��ƌWԺ�������Ȍ��Ƽ���헣�XDB1030402���ͱ������ߵȌWУԽ����ƌW��Ӌ����JWZQ20240102014�����Ŀ��֧�֡�
��������Ї��ƌWԺ�������g�о���������о��T�����w���о��T�F��ڷ���������׃���Ϻ������I��ȡ����ϵ����Ҫͻ�ơ����磬�F�������ͽ���ۺϷ����Ƃ�ˮ���z/�����zJanus�ۺ���Ĥ���������F���|���IJ��ϵĸߏ��ȽY�ϣ�NPG Asia Mater. 2017, 9, e380�����ڴ˻��A�ϣ��F��_�l��һ�N�����T�����S����ۺϣ�WET-DIP�����ԣ��Ƃ��˺��^�������z��ˮ���z���ϣ�Small 2023, 19, 2208157����2022�꣬�F�����ҕ�����������\�ӣ���ʾ���������푑��ij����\�ӵĊW�غ;S�����\�ӵęC�ƣ����ܴˆ��l�аl�˾�����������푑��ij����\�ӵ��˹����b�ã�Nat. Mater. 2022, 21, 1357-1365�����S�F��Mһ�����Y��ֲ��M��������׃�ٶȵęC�ƺͲ��ԣ������ij��쵽�������{�أ��������һЩ�����W�IJ��ԣ����������ٶȿɿصķ����C���ˣ�Nano Res. 2023, 17, 570-586�������⣬��������˺�z���^�̆��l���F����һ�N���ڄ��x�T���nj��Q���ԑ�׃�Ŀɿ��Π��D׃���ԣ��m���ھۺ�����١��w�SĤ�Ⱦ������������IJ��ϣ���������ӵ�2D��3D�D׃�ṩ���·�����Nat. Commun. 2022, 13, 7294�������]���B�m��푑����ڌ��H��������Ҫ�ԣ�ԓ�F�ϵ�y���Y�����x���ķN�ں㶨�h���Ќ��F�B�m��푑��ӵIJ��ԣ�������̽ӑ���@�ķN���ԵĻ���ԭ�����m�÷�������ȱ�c�����ü�����ȣ�Adv. Mater. 2025, 37, 2502926����
ԭ��朽ӣ�https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202519226
�n�}�M�Wվ��https://www.x-mol.com/groups/Zhang_Feilong
- �п�Ժ�������MԺ�ŌW�����о��T�F��аl����׃ɫ��ܛ�w���� 2019-08-02
- �п�Ժ�������MԺ�ŌW���о��Fꠌ��FNa+/Ca2+�|�l���yˮ���z�ɿ����S��׃ 2019-01-21
- �A������߅�������w�i������������ڈF� Nat. Chem.���_�l����ˮ�¡��f���z�� - �`��Դ�Ժ������� 2026-03-31
- ���t��һ��Ժʢ�������/�A�ƴ��R������ AFM�������˷������ˮ���z�NƬ-�ڼ���p���ί�����ȡ�����Mչ 2026-03-02
- ����������·���ڈF� AFM���ġ����顱���ֵ��IС������{���w�SĤ - ���F�{��Һ��ͨ�����x 2026-02-25
